- 时间:2024-10-09 11:35:59
- 浏览:
AGV小车控制系统的设计与实现

随着工业自动化和智能化水平的不断提高,自动引导车辆(AGV)在物流、制造等行业中的应用越来越广泛。AGV小车控制系统作为AGV的核心部分,其设计与实现直接影响到AGV的运行效率和稳定性。本文将详细介绍AGV小车控制系统的设计与实现过程。
一、AGV小车控制系统的组成

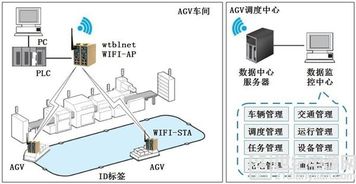
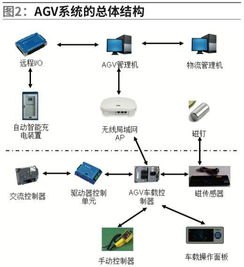
AGV小车控制系统主要由以下几个部分组成:
传感器模块:用于检测AGV小车周围的环境信息,如距离、障碍物等。
控制器模块:负责接收传感器模块的数据,并根据预设的程序进行决策和控制。
执行器模块:根据控制器模块的指令,驱动AGV小车进行运动。
通信模块:负责AGV小车与其他设备或系统之间的数据交换。
二、传感器模块的设计
传感器模块是AGV小车控制系统的关键部分,其性能直接影响到AGV小车的运行安全。以下是几种常见的传感器及其应用:
红外传感器:用于检测AGV小车前方的障碍物,实现避障功能。
超声波传感器:用于测量AGV小车与障碍物之间的距离,实现精确的定位和导航。
激光雷达:用于获取AGV小车周围环境的3D信息,实现高精度导航。
三、控制器模块的设计

控制器模块是AGV小车控制系统的核心,其设计主要包括以下几个方面:
算法设计:根据传感器模块获取的数据,设计相应的控制算法,如PID控制、模糊控制等。
程序编写:根据算法设计,编写控制器模块的程序,实现AGV小车的运动控制。
实时性要求:控制器模块需要具备较高的实时性,以保证AGV小车的稳定运行。
四、执行器模块的设计
执行器模块是AGV小车控制系统的动力来源,其设计主要包括以下几个方面:
电机选择:根据AGV小车的负载和运动需求,选择合适的电机。
驱动电路设计:设计驱动电路,为电机提供稳定的电源和驱动信号。
保护措施:设计相应的保护措施,如过流保护、过压保护等,以保证AGV小车的安全运行。
五、通信模块的设计

通信模块是AGV小车控制系统与其他设备或系统进行数据交换的桥梁,其设计主要包括以下几个方面:
通信协议选择:根据实际需求,选择合适的通信协议,如CAN总线、以太网等。
接口设计:设计通信接口,实现AGV小车与其他设备或系统之间的物理连接。
数据传输:实现AGV小车与其他设备或系统之间的数据传输,如指令、状态信息等。
AGV小车控制系统是AGV的核心部分,其设计与实现直接影响到AGV的运行效率和稳定性。本文从传感器模块、控制器模块、执行器模块和通信模块等方面,详细介绍了AGV小车控制系统的设计与实现过程。在实际应用中,应根据具体需求进行优化和改进,以提高AGV小车的性能和可靠性。